 |
 |
 |
 |
 |
 |
|
 |
 |
 |
 |
|
 |
 |
 |
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
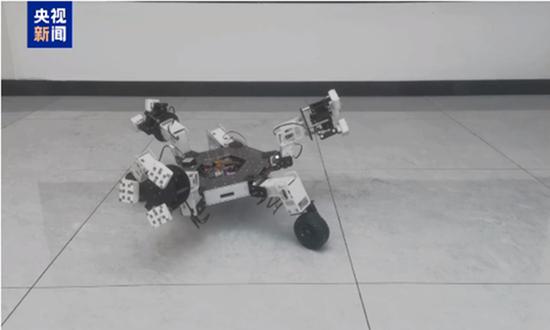
Researchers from the China University of Mining and Technology develops China's first space mining robot. (Photo/Screenshot from CCTV News) China's first space mining robot has been developed by the China University of Mining and Technology (CUMT). It not only adapts to the microgravity conditions of space but also navigates the rugged, cratered terrain of asteroids, CCTV News reported on Sunday. The prototype has now filed patents with relevant authorities and successfully cleared preliminary reviews, the report said. This multifunctional space mining robot is developed by a research team headed by Professor Liu Xinhua at CUMT. According to CCTV, it features a six-legged configuration with three wheeled limbs and three clawed limbs. Liu said the design was primarily created to adapt to the microgravity environment of space, according to the report. Space mining robots are confronted with geological exploration and mineral collection on extraterrestrial bodies, requiring essential drilling capabilities. Under Earth's gravity, the robot's own weight is sufficient to support the drill's penetration. However, lunar gravity is only one-sixth of Earth's, and asteroids often exhibit ultra-low gravity, posing significant challenges for drilling into their surfaces. To address the problem caused by microgravity, the team drew inspirations from insect claw-and-spine structures, and equipped the robot with specialized clawed limbs. Liu said its array-style claw design enhances adhesion and anchoring capabilities in microgravity, allowing the robot to stabilize itself for sampling while adapting its movement to terrain. Beyond microgravity adaptation, the robot's bionic six-legged mobile structure combines wheels and anchoring mechanisms at the limb tips, enabling traversal across uneven asteroid surfaces, the report said. Liu said they have achieved equivalent experiments for microgravity conditions. "In simulated lunar soil environments, the robot can walk, anchor, and even collect samples," he added. Currently, the prototype of the space mining robot has applied for patents with relevant authorities and passed initial reviews, the report said. To facilitate the robot to better withstand extreme temperature fluctuations, vacuum conditions, space radiation, weight and volume constraints on celestial bodies, the team also built a simulated training ground. The simulated environment replicates the weathered surface of near-Earth asteroids by using sandy soil and adopts a suspension system to simulate microgravity variations, said Hua Dezheng, an associate professor from CUMT. Through the coordinated operation of the six-legged differential suspension system and clutch mechanisms, the robot has been able to adjust its structural shape according to the environment, thus adapting to the complex surface environment of extraterrestrial terrains, according to team members. To master more advanced skills, the robot will undergo advanced training at the State Key Laboratory of Intelligent Construction and Healthy Operation and Maintenance of Deep Underground Engineering at CUMT, where the facility can precisely simulate extreme lunar surface conditions, CCTV said. After replicating the lunar environment, the team employ simulated lunar soil with properties closely matching real lunar regolith to achieve high-fidelity reconstruction of the moon's stratigraphic characteristics. "This effectively creates conditions essentially identical to those on the lunar surface,'' Li Ruilin, an associate professor from the laboratory said. "Experiments conducted under these simulated conditions yield data that closely approximates actual lunar mission results." |
 |
 |
 |
 |
 |
 |
 |

Powered by Discuz! X3.4
© 2001-2013 Comsenz Inc.